本文主要内容:简单分析NAPI的原理和实现。
内核版本:2.6.37
Author:zhangskd @ csdn
概述
NAPI是linux新的网卡数据处理API,据说是由于找不到更好的名字,所以就叫NAPI(New API),在2.5之后引入。
简单来说,NAPI是综合中断方式与轮询方式的技术。
中断的好处是响应及时,如果数据量较小,则不会占用太多的CPU事件;缺点是数据量大时,会产生过多中断,
而每个中断都要消耗不少的CPU时间,从而导致效率反而不如轮询高。轮询方式与中断方式相反,它更适合处理
大量数据,因为每次轮询不需要消耗过多的CPU时间;缺点是即使只接收很少数据或不接收数据时,也要占用CPU
时间。
NAPI是两者的结合,数据量低时采用中断,数据量高时采用轮询。平时是中断方式,当有数据到达时,会触发中断
处理函数执行,中断处理函数关闭中断开始处理。如果此时有数据到达,则没必要再触发中断了,因为中断处理函
数中会轮询处理数据,直到没有新数据时才打开中断。
很明显,数据量很低与很高时,NAPI可以发挥中断与轮询方式的优点,性能较好。如果数据量不稳定,且说高不高
说低不低,则NAPI则会在两种方式切换上消耗不少时间,效率反而较低一些。
实现
来看下NAPI和非NAPI的区别:
(1) 支持NAPI的网卡驱动必须提供轮询方法poll()。
(2) 非NAPI的内核接口为netif_rx(),NAPI的内核接口为napi_schedule()。
(3) 非NAPI使用共享的CPU队列softnet_data->input_pkt_queue,NAPI使用设备内存(或者
设备驱动程序的接收环)。
(1) NAPI设备结构
/* Structure for NAPI scheduling similar to tasklet but with weighting */ struct napi_struct { /* The poll_list must only be managed by the entity which changes the * state of the NAPI_STATE_SCHED bit. This means whoever atomically * sets that bit can add this napi_struct to the per-cpu poll_list, and * whoever clears that bit can remove from the list right before clearing the bit. */ struct list_head poll_list; /* 用于加入处于轮询状态的设备队列 */ unsigned long state; /* 设备的状态 */ int weight; /* 每次处理的最大数量,非NAPI默认为64 */ int (*poll) (struct napi_struct *, int); /* 此设备的轮询方法,非NAPI为process_backlog() */ #ifdef CONFIG_NETPOLL ...#endif unsigned int gro_count; struct net_device *dev; struct list_head dev_list; struct sk_buff *gro_list; struct sk_buff *skb;}; (2) 初始化
初始napi_struct实例。
void netif_napi_add(struct net_device *dev, struct napi_struct *napi, int (*poll) (struct napi_struct *, int), int weight){ INIT_LIST_HEAD(&napi->poll_list); napi->gro_count = 0; napi->gro_list = NULL; napi->skb = NULL; napi->poll = poll; /* 设备的poll函数 */ napi->weight = weight; /* 设备每次poll能处理的数据包个数上限 */ list_add(&napi->dev_list, &dev->napi_list); /* 加入设备的napi_list */ napi->dev = dev; /* 所属设备 */ #ifdef CONFIG_NETPOLL spin_lock_init(&napi->poll_lock); napi->poll_owner = -1;#endif set_bit(NAPI_STATE_SCHED, &napi->state); /* 设置NAPI标志位 */} (3) 调度
在网卡驱动的中断处理函数中调用napi_schedule()来使用NAPI。
/** * napi_schedule - schedule NAPI poll * @n: napi context * Schedule NAPI poll routine to be called if it is not already running. */ static inline void napi_schedule(struct napi_struct *n){ /* 判断是否可以调度NAPI */ if (napi_schedule_prep(n)) __napi_schedule(n);} 判断NAPI是否可以调度。如果NAPI没有被禁止,且不存在已被调度的NAPI,
则允许调度NAPI,因为同一时刻只允许有一个NAPI poll instance。
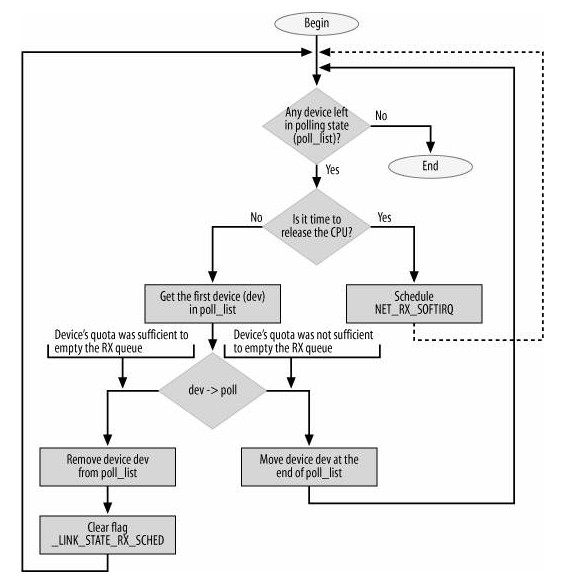
/** * napi_schedule_prep - check if napi can be scheduled * @n: napi context * Test if NAPI routine is already running, and if not mark it as running. * This is used as a condition variable insure only one NAPI poll instance runs. * We also make sure there is no pending NAPI disable. */ static inline int napi_schedule_prep(struct napi_struct *n){ return !napi_disable_pending(n) && !test_and_set_bit(NAPI_STATE_SCHED, &n->state);} static inline int napi_disable_pending(struct napi_struct *n){ return test_bit(NAPI_STATE_DISABLE, &n->state);} enum { NAPI_STATE_SCHED, /* Poll is scheduled */ NAPI_STATE_DISABLE, /* Disable pending */ NAPI_STATE_NPSVC, /* Netpoll - don't dequeue from poll_list */}; NAPI的调度函数。把设备的napi_struct实例添加到当前CPU的softnet_data的poll_list中,
以便于接下来进行轮询。然后设置NET_RX_SOFTIRQ标志位来触发软中断。
void __napi_schedule(struct napi_struct *n){ unsigned long flags; local_irq_save(flags); ____napi_schedule(&__get_cpu_var(softnet_data), n); local_irq_restore(flags);} static inline void ____napi_schedule(struct softnet_data *sd, struct napi_struct *napi){ /* 把napi_struct添加到softnet_data的poll_list中 */ list_add_tail(&napi->poll_list, &sd->poll_list); __raise_softirq_irqoff(NET_RX_SOFTIRQ); /* 设置软中断标志位 */}
(4) 轮询方法
NAPI方式中的POLL方法由驱动程序提供,在通过netif_napi_add()加入napi_struct时指定。
在驱动的poll()中,从自身的队列中获取sk_buff后,如果网卡开启了GRO,则会调用
napi_gro_receive()处理skb,否则直接调用netif_receive_skb()。
POLL方法应该和process_backlog()大体一致,多了一些具体设备相关的部分。
(5) 非NAPI和NAPI处理流程对比
以下是非NAPI设备和NAPI设备的数据包接收流程对比图:
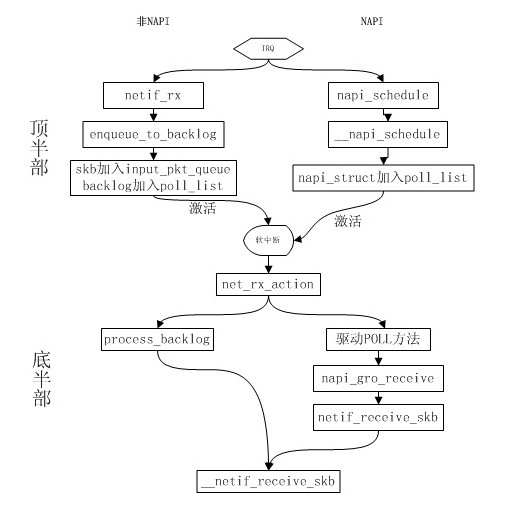
NAPI方式在上半部中sk_buff是存储在驱动自身的队列中的,软中断处理过程中驱动POLL方法调用
netif_receive_skb()直接处理skb并提交给上层。
/** * netif_receive_skb - process receive buffer from network * @skb: buffer to process * netif_receive_skb() is the main receive data processing function. * It always succeeds. The buffer may be dropped during processing * for congestion control or by the protocol layers. * This function may only be called from softirq context and interrupts * should be enabled. * Return values (usually ignored): * NET_RX_SUCCESS: no congestion * NET_RX_DROP: packet was dropped */ int netif_receive_skb(struct sk_buff *skb){ /* 记录接收时间到skb->tstamp */ if (netdev_tstamp_prequeue) net_timestamp_check(skb); if (skb_defer_rx_timestamp(skb)) return NET_RX_SUCCESS; #ifdef CONFIG_RPS ...#else return __netif_receive_skb(skb);#endif} __netif_receive_skb()在上篇blog中已分析过了,接下来就是网络层来处理接收到的数据包了。
转自https://blog.csdn.net/zhangskd/article/details/21627963